Ho alcuni aggiornamenti e modifiche al Dynahead.
ho montato la
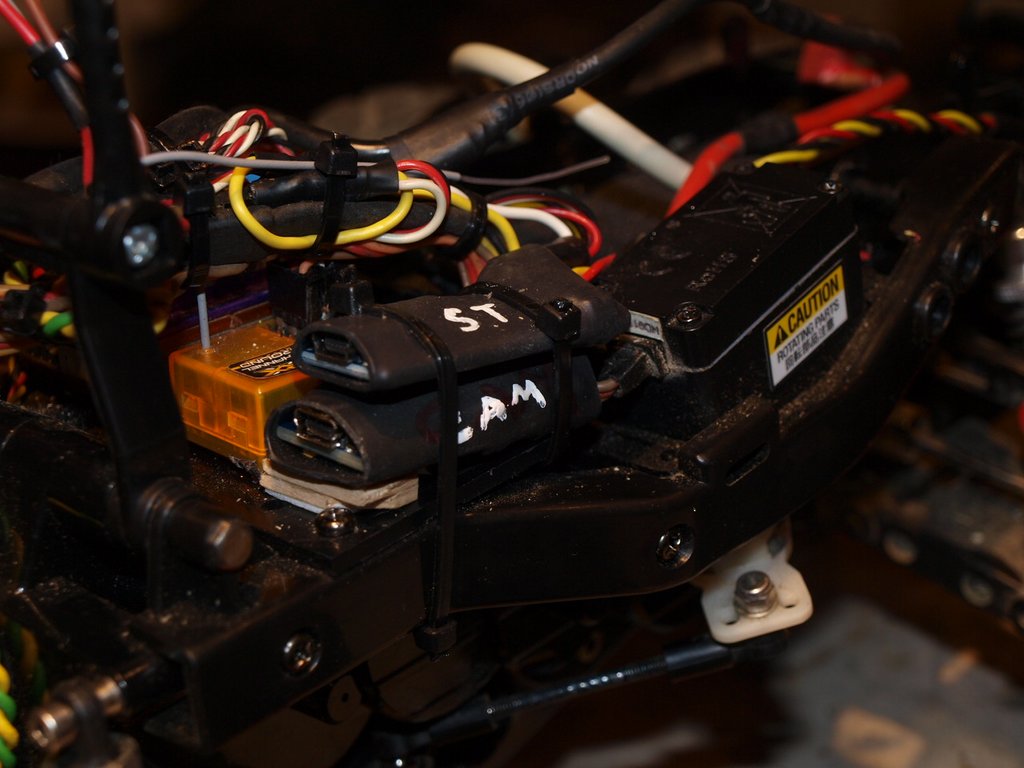
centralina 4 ruote sterzanti con arduino nano
seconda scheda nano che si va ad aggiungere a quella che già gestiva il servo della camera fpv.
nonostante entrambe le centraline condividono il segnale di sterzo non interferiscono tra loro.

adesso è veramente agile almeno a bassa velocità, gira 180° in circa 80cm.
ho impostato la centralina per eliminare totalmente le 4 ruote sterzanti a tutto gas, giusto per evitare di cappottare.
tra l'altro il dyna gira già abbastanza anche 2ws.

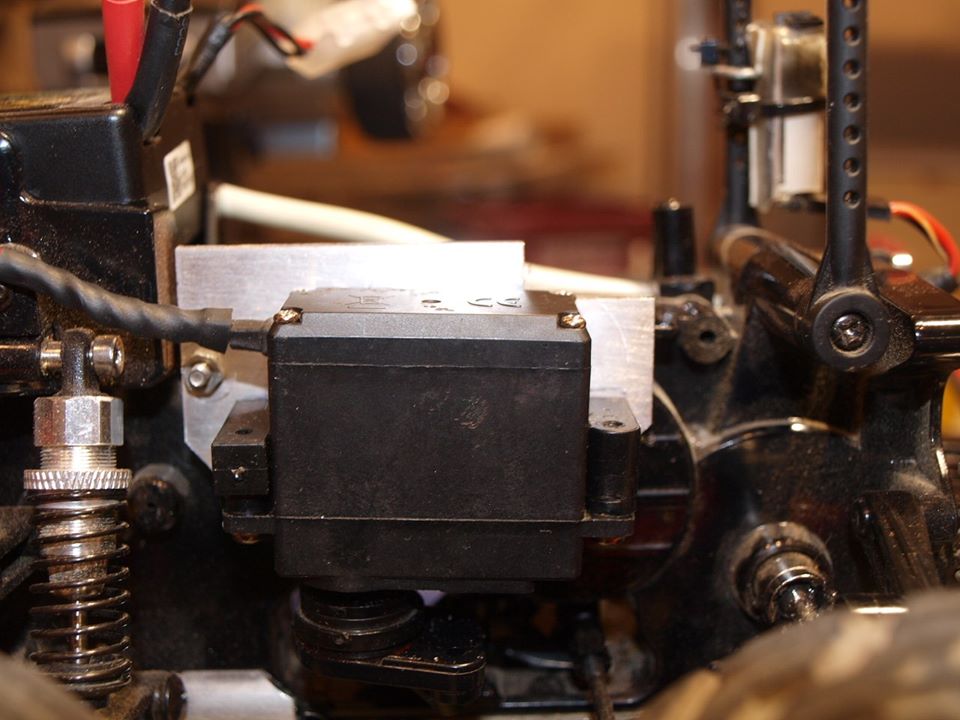
il servo l'ho dovuto spostare dalla posizione delle istruzioni perchè è completamente sbagliata, ho dovuto anche fare una piastra per evitare che basculi.. di scatola è spostato di 4 mm nel vuoto e ovviamente quando lavora si piega di traverso.

il servo posteriore su questo camion è messo in modo assurdo, necessita di modifiche radicali sia per avere un fissaggio solido e sia per trovare la giusta leva efficace per farlo funzionare, di scatola lavora bene solo girando a destra, il rinvio resta diagonale in altezza e la posizione crea un punto morto girando a sinistra.
in pratica ho montato il servo circa un centimetro più in basso e arretrato rispetto ai fori dei supporti e adesso funziona tutto benissimo.

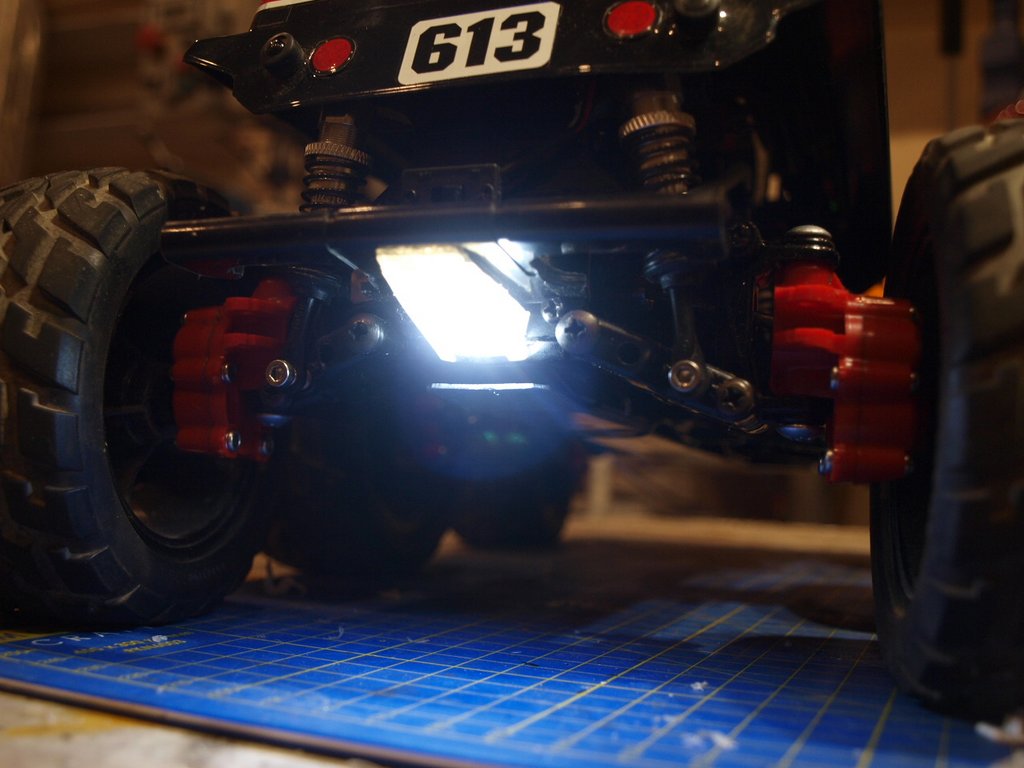
poi ho montato una luce per illuminare i miei passi in notturna.. davvero comoda in certe situazioni.

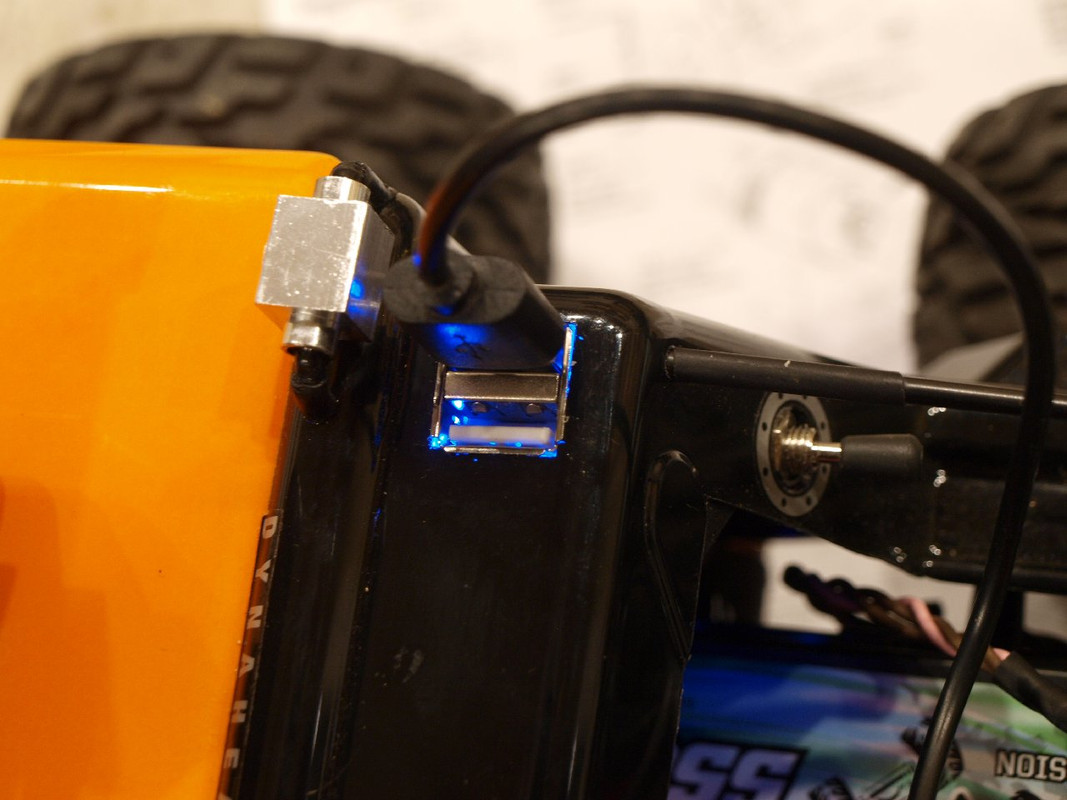
infine ho costruito un gps per tenere il conto delle distanze percorse, velocità e dislivelli..
https://create.arduino.cc/projecthub...52375&offset=0
l'ho montato dentro una scatola indipendente in modo da poterlo portare in girata anche su altri modelli.. è tenuto da un paio di cinghie e viene alimentato dalla usb sul tetto.


in questo modo ho ricostruito le girate fatte e i 32-35km che al momento ha già percorso.
col motore brushless sensored 17.5T pignone di 18T la velocità massima è di 9kmh e con una lipo da 5500mAh percorro circa 12km in piana a patto di moderarmi con i gadget che sono accesi.