Finalmente arrivati gli ultimi componenti e trovato il tempo di assemblare il tuto.
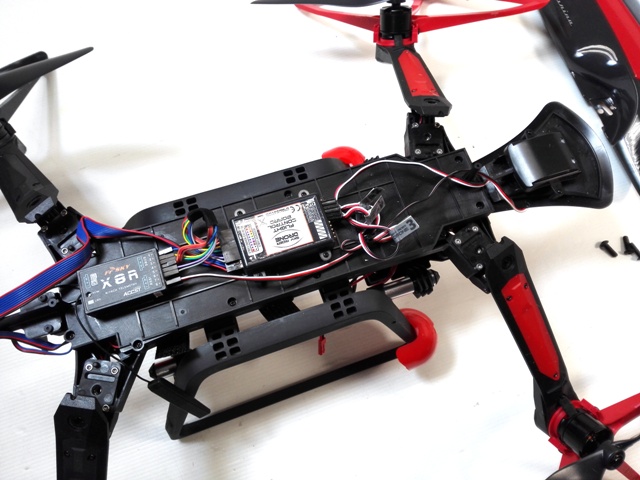
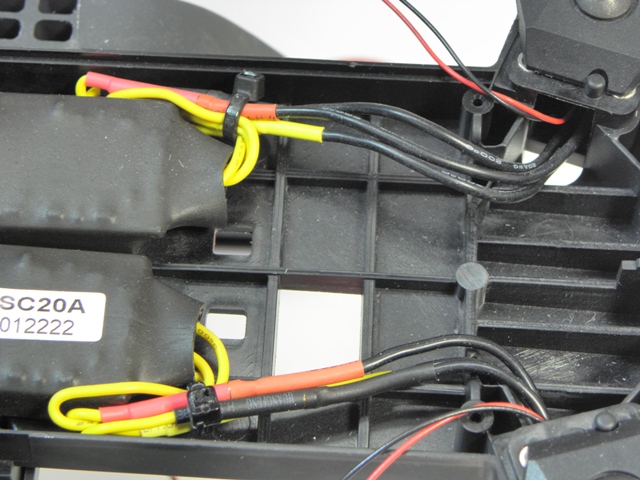
Anzi sarebbe meglio dire disassemblare, visto che per seguire le istruzioni postume dell'editore ho dovuto sposare gli ESC e sistemare la cavetteria.
Sono contento che il materiale mi sia arrivato tardi così non sono impazzito con la sequenza motori limitandomi a dare i numero giusto alle varie spinette per poi collegarle alla centralina.
l'ultimo grosso scoglio è stato l'uso di una radio diversa da quella prevista in offerta con l'opera (ma con tutte quelle che ho in casa andarne a comprare un'altra....).
Prima di tutto ho dovuto capire (visto che non viene spiegato) a quale funzione corrispondono le singole spinette che escono dalla centralina, cioè quale è il cavetto degli alettoni, quello del rudder, motore etc, mentre è stato ovviamente facile individuare i canali 5 e 6 che comandano i mode di volo. Qui nasce il secondo problema: sulla mia radio ho un solo canale a 3 posizioni mentre per i mode ce ne vogliono 2. Soluzione? Ho usato, ovviamente l'interruttore disponibile, poi di programmazione ho trasformato 2 interruttori posti in posizione idonea in un unico interruttore a 3 posizioni, cioè:
interruttori tutti indietro-posizione 0
interruttore 1 avanti - posizione 1
interruttore 1 avanti interruttore 3 avanti-posizione 2


Controllato (sul display della radio) che tutto funzionasse a dovere e collegata la telecamera al canale 8 col solito giochetto dei 2 interruttori per gestire le 3 posizioni) ho collegato il drone al PC doo aver caricato il relativo programma. Il PC si è caricato da solo i driver e speravo partisse subito, invece non mi trovava la porta di comunicazione.
In questo caso, dopo aver verificato dal PC che i driver fossero ok, ho trovato la soluzione sul forum facendo partire il programma in modalità ADMIN.
A questo punto funzionava tutto a dovere e la scelta della porta è avvenuta automaticamente.
Ho controllato la direzione di movimento dei comandi (dovendo invertire quello dell'elevatore) e degli interruttori (tutti da invertire) ed alla fine tutto è risultato a posto.
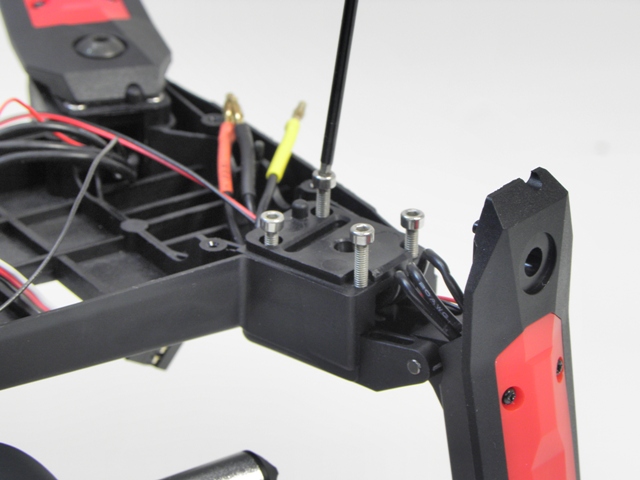
A questo punto, dopo aver smontato i motori

e posizionati i nuovi supporti dei paraeliche e montati questi ultimi ho alimentato la trasmittente e poi il drone andando poi ad accendere i motori per controllarne il verso di rotazione (che deve coincidere con le frecce presenti sui bracci): tutto a posto

(avevo comunque già controllato la presenza dei bollini sui motori con rotazione oraria come da check list fornita da DEA).
A questo punto tocca alla calibrazione della bussola, sempre seguendo le istruzioni, solo che a me, che lavoro in mode 1, la posizione per far partire la calibrazione stessa è risultata un tantino differente
Dopo qualche prova (e parolaccia) ho trovato la combinazione giusta ed il cicalino col suo ronzio mi ha segnalato la correttezza delle operazioni in corso.
Quindi calibrazione dei sensori (sempre con una posizione diversa di attivazione ed uscita dalla procedura)

A questo punto era sera inoltrata ma non ho saputo resistere ed ho portato il drone (dopo aver montato le eliche) in un piccolo spiazzo per provare almeno un decollo.
Avendo letto di tutto e di più ero un pò impensierito, ho ricontrollato trenta volte la posizione degli interruttori (tutti indietro per un volo manual mode) e poi ho acceso radiocomando e quindi alimentato il drone.
Ho aspettato parecchio per vedere se si accendeva la benedetta luce verde del GPS, ma nulla!
Dato però che al momento volevo solo sollevarlo da terra ho comunque provato un decollo: risultato una strsciata in avanti....
Ma pooorca miseria, vuoi vedere che ho sbagliato anch'io la sequenza motori?
Non demordo e riprovo, questa volta rotolo sul fianco destro
Demoralizzato mi do un'ultimo tentativo, ci vado più deciso sul gas e lo ky Rider con un lieve dondolio stacca restando abbastanza fermo a 1 m da terra!
SODDISFATTO COME UN BIMBO CHE RICEVE LA PLAY A NATALE!!!
Provo qualche movimento ma dopo poco il cicalino incomincia un beep e visto che non ho attivato alcuna modalità di volo dovrebbe essere la batterie scarica, quindi atterro e torno alla base.
per stasera basta così!





















































 )
)



































 .
.







