|
Moderatore
Registrato dal: Jan 2009
residenza: Como
Messaggi: 12,384
|

Servocomandi
Prendiamo in considerazione solo i servi per lo sterzo per ora...
 In base alla scala ci sono vari servi di diverse dimensioni, per cui in taluni casi bisognerà guardare prima di tutto chi produce i servi per quella scala (sto pensando a mezzi tipo Revino e Carisma, che usano servi da 30mm di lunghezza).
Ora possiamo decidere se vogliamo usare un servo analogico o digitale. La differenza? I servi digitali sono programmabili, più precisi, più potenti, più veloci come elaborazione dei dati, possono essere alimentati direttamente con le lipo (solo alcuni specifici), ma consumano più corrente e perciò richiedono che ci sia una buona sezione di alimentazione ed infine (normalmente) più costosi. Non sempre è una buona idea mescolare servi analogici e digitali. Non è fattibile con trasmissioni veloci (gli analogici saltano come grilli sul barbeque).
I parametri che di solito si guardano sono la velocità e la coppia del servo. Nel touring di solito si predilige una elevata velocità di reazione del servo, cercando possibilmente di stare sotto gli 0.1 secondi per percorrere un arco di 60°. Ma è importante anche una buona coppia (sopra i 10 kg), in quanto in curva le ruote tendono a raddrizzarsi da sole (pensate in auto vera, quando lasciate il volante al termine della curva). Di conseguenza se il servo ha poca coppia le ruote tendono a raddrizzarsi e il modello tende a non seguire la traiettoria impostata.
Penso sia praticamente uguale nel drift, dove ci sono parecchi cambi di direzione, anche se forse un servo troppo veloce induce sbandate esagerate.
Su monster e nell'off invece conta più la coppia, soprattutto al salire della scala. E' vero che normalmente si sterza in movimento (dove serve meno forza che da fermi), ma far sterzare un modello (magari molto pesante) su diversi tipi di terreno non è facile. Meglio rinunciare ad un po' di velocità. Tra l'altro con fondi a scarsa trazione potrebbe rendere instabile la guida.
In ultimo, su scaler e crawler, dove le velocità sono ridotte, è molto più importante la coppia del servo, soprattutto durante le scalate o in situazioni impervie.
Altri parametri da tenere in considerazione sui servi sono il materiale degli ingranaggi. I servi base hanno ingranaggi in plastica che possono rompersi in seguito ad urti o per usura, mentre quelli ad alte prestazioni hanno ingranaggi in metallo (acciaio o titanio), per resistere alla coppia del servo ed alle asperità del terreno. Normalmente si prediligono comunque in metallo, per la resistenza.
Ultimo parametro che si guarda è il tipo di motore del servo. Coreless (senza la parte interna e quindi meno inerzia e più velocità), brushless, standard. Ma sono (secondo me) particolari di minore importanza.
Motori
Nei modelli elettrici, il motore è logicamente elettrico. Abbiamo 2 macrofamiglie di motori, a spazzole (brushed) o senza spazzole (brushless). Quale scegliere? Prima di tutto è meglio capire che differenza c'è tra i due tipi di motori.
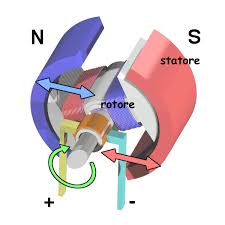
Nei motori elettrici si "gioca" con i campi magnetici. La rotazione è indotta da un cambio di campo magnetico: 2 magneti uguali (positivo e positivo o negativo e negativo) si respingono, mentre 2 magneti diversi (positivo e negativo) si attraggono.
I motori a spazzole sono i classici motori elettrici che troviamo praticamente ovunque.
In base alla scala ci sono vari servi di diverse dimensioni, per cui in taluni casi bisognerà guardare prima di tutto chi produce i servi per quella scala (sto pensando a mezzi tipo Revino e Carisma, che usano servi da 30mm di lunghezza).
Ora possiamo decidere se vogliamo usare un servo analogico o digitale. La differenza? I servi digitali sono programmabili, più precisi, più potenti, più veloci come elaborazione dei dati, possono essere alimentati direttamente con le lipo (solo alcuni specifici), ma consumano più corrente e perciò richiedono che ci sia una buona sezione di alimentazione ed infine (normalmente) più costosi. Non sempre è una buona idea mescolare servi analogici e digitali. Non è fattibile con trasmissioni veloci (gli analogici saltano come grilli sul barbeque).
I parametri che di solito si guardano sono la velocità e la coppia del servo. Nel touring di solito si predilige una elevata velocità di reazione del servo, cercando possibilmente di stare sotto gli 0.1 secondi per percorrere un arco di 60°. Ma è importante anche una buona coppia (sopra i 10 kg), in quanto in curva le ruote tendono a raddrizzarsi da sole (pensate in auto vera, quando lasciate il volante al termine della curva). Di conseguenza se il servo ha poca coppia le ruote tendono a raddrizzarsi e il modello tende a non seguire la traiettoria impostata.
Penso sia praticamente uguale nel drift, dove ci sono parecchi cambi di direzione, anche se forse un servo troppo veloce induce sbandate esagerate.
Su monster e nell'off invece conta più la coppia, soprattutto al salire della scala. E' vero che normalmente si sterza in movimento (dove serve meno forza che da fermi), ma far sterzare un modello (magari molto pesante) su diversi tipi di terreno non è facile. Meglio rinunciare ad un po' di velocità. Tra l'altro con fondi a scarsa trazione potrebbe rendere instabile la guida.
In ultimo, su scaler e crawler, dove le velocità sono ridotte, è molto più importante la coppia del servo, soprattutto durante le scalate o in situazioni impervie.
Altri parametri da tenere in considerazione sui servi sono il materiale degli ingranaggi. I servi base hanno ingranaggi in plastica che possono rompersi in seguito ad urti o per usura, mentre quelli ad alte prestazioni hanno ingranaggi in metallo (acciaio o titanio), per resistere alla coppia del servo ed alle asperità del terreno. Normalmente si prediligono comunque in metallo, per la resistenza.
Ultimo parametro che si guarda è il tipo di motore del servo. Coreless (senza la parte interna e quindi meno inerzia e più velocità), brushless, standard. Ma sono (secondo me) particolari di minore importanza.
Motori
Nei modelli elettrici, il motore è logicamente elettrico. Abbiamo 2 macrofamiglie di motori, a spazzole (brushed) o senza spazzole (brushless). Quale scegliere? Prima di tutto è meglio capire che differenza c'è tra i due tipi di motori.
Nei motori elettrici si "gioca" con i campi magnetici. La rotazione è indotta da un cambio di campo magnetico: 2 magneti uguali (positivo e positivo o negativo e negativo) si respingono, mentre 2 magneti diversi (positivo e negativo) si attraggono.
I motori a spazzole sono i classici motori elettrici che troviamo praticamente ovunque.
 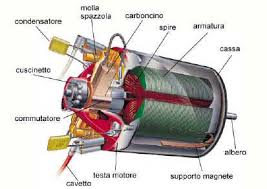 Sono economici e sono composti da 2 parti: la cassa (o statore) ed il rotore. La cassa contiene al suo interno 2 magneti incollati alla cassa. Sul rotore invece ci sono diversi avvolgimenti di cavo. Un avvolgimento percorso da corrente si trasforma in un elettromagnete. In cima al rotore vi è un collettore (o commutatore), un disco diviso in varie sezioni in cui ogni sezione è collegata da un filo ad uno degli avvolgimenti. Sul tappo (fissato alla carcassa) vi sono due contatti. Tramite delle molle e dei carboncini (la grafite conduce elettricità) si da corrente alle varie sezioni del collettore. Ruotando cambia la sezione del collettore, quindi si cambia anche la polarità dell'elettromagnete e si cambia da attrazione a repulsione. Per controllare la rotazione del motore basta variare la quantità di corrente (i V) che forniamo al motore. Di conseguenza il regolatore che pilota questi motori è molto semplice (una resistenza variabile).
Questi motori ruotano senza problemi anche con pochi volt, senza tremolii. Però non hanno prestazioni eccelse ad alto numero di giri. Inoltre avendo anche parti di contatto con lo statore (i carboncini) parte dell'efficienza del motore viene annullata. Questi motori hanno bisogno di un rodaggio iniziale e di manutenzione, in quanto i carboncini in origine sono quadrati, mentre il collettore è rotondo. Per avere la massima efficienza il carboncino deve consumarsi fino ad aumentare l'area di contatto con il collettore. Però col tempo, molle e carboncini vanno sostituiti.
I motori brushless sono, come dice il nome (brush = spazzole, less = senza), senza spazzole.
Sono economici e sono composti da 2 parti: la cassa (o statore) ed il rotore. La cassa contiene al suo interno 2 magneti incollati alla cassa. Sul rotore invece ci sono diversi avvolgimenti di cavo. Un avvolgimento percorso da corrente si trasforma in un elettromagnete. In cima al rotore vi è un collettore (o commutatore), un disco diviso in varie sezioni in cui ogni sezione è collegata da un filo ad uno degli avvolgimenti. Sul tappo (fissato alla carcassa) vi sono due contatti. Tramite delle molle e dei carboncini (la grafite conduce elettricità) si da corrente alle varie sezioni del collettore. Ruotando cambia la sezione del collettore, quindi si cambia anche la polarità dell'elettromagnete e si cambia da attrazione a repulsione. Per controllare la rotazione del motore basta variare la quantità di corrente (i V) che forniamo al motore. Di conseguenza il regolatore che pilota questi motori è molto semplice (una resistenza variabile).
Questi motori ruotano senza problemi anche con pochi volt, senza tremolii. Però non hanno prestazioni eccelse ad alto numero di giri. Inoltre avendo anche parti di contatto con lo statore (i carboncini) parte dell'efficienza del motore viene annullata. Questi motori hanno bisogno di un rodaggio iniziale e di manutenzione, in quanto i carboncini in origine sono quadrati, mentre il collettore è rotondo. Per avere la massima efficienza il carboncino deve consumarsi fino ad aumentare l'area di contatto con il collettore. Però col tempo, molle e carboncini vanno sostituiti.
I motori brushless sono, come dice il nome (brush = spazzole, less = senza), senza spazzole.
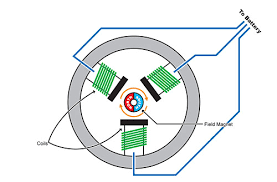
 Si va ad utilizzare sempre l'interazione tra campi magnetici, ma in questo caso i magneti permanenti (o calamite) sono incollate sul rotore, mentre gli avvolgimenti sono sullo statore. Gli avvolgimenti sono collegati al regolatore da 3 fili. In base a dove passa la corrente, la relativa bobina sarà un elettromagnete con polarità positiva o negativa.
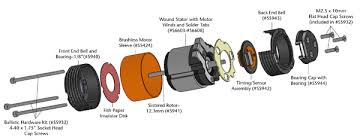
In questo caso non ci sono punti di contatto tra rotore e statore, se non i 2 cuscinetti (praticamente l'unica manutenzione di questi motori) dove appoggia il rotore. Visto che le bobine sono sullo statore, come si fa a far ruotare il campo magnetico (visto che sul rotore sono sempre nella stessa posizione)? Semplicemente è il regolatore (o ESC) che tramite i 3 fili genera un campo magnetico rotante. La costruzione del regolatore è un po' più complicata. Questo tipo di motore è più potente, consuma meno corrente rispetto ai brushed ma richiede che il campo magnetico venga generato in maniera precisa e, per far questo, il regolatore deve sapere in che posizione si trova il rotore. Ci sono due tipi di motori brushless, a sensori o senza. Senza sensori, il regolatore "sente" in che posizione si trova il rotore in base alle "interferenze" che le calamite sul rotore generano negli elettromagneti (che essendo collegati al regolatore recepisce queste fluttuazioni). Questo trucchetto funziona purtroppo solamente ad alto numero di giri. Quando il motore gira piano, le interferenze sono talmente deboli che il regolatore non capisce la posizione del rotore, con il risultato che il motore non gira liscio, ma va a scatti (fenomeno chiamato cogging). Per sopperire a questo problema, alcuni brushless hanno un sistema di sensori che, tramite un apposito cavo, comunica al regolatore in che posizione si trova il rotore che, quindi, sa sempre in che posizione sia il rotore. Questo sistema elimina il cogging, ma purtroppo è efficacie solo con un numero di giri non troppo elevato, altrimenti il sistema non riesce a "stare dietro" a tutto.
Alcuni regolatori (come il Tekin RS Pro) sono in grado di usare i sensori a basso numero di giri per avere linearità di accelerazione e, arrivati ad un certo regime, di ignorarli in modo da poter far salire il motori di giri il più possibile.
Per tutti i tipi di motore elettrico ci sono alcuni parametri da tenere in considerazione: i KV ed i T.
I KV indicano quanti giri fa al minuto il motore per ogni volt applicato. 1000kv a 7.4V significa che il motore fa 7400 giri/min dandogli 7.4V
I T indica gli avvolgimenti (turn in inglese). Gli avvolgimenti sono le spire di filo che vanno a formare gli elettromagneti del motore. Maggiore è il numero di avvolgimenti, minore è la velocità di rotazione (e quindi minore è il numero di KV), ma maggiore è la coppia generata dal motore (sui crawler si usano motori da 18.5T, tipo il goat 3s, sino a 80 T). E minori sono i consumi di corrente.
Al contrario, allo scendere con i "T" diminuisce la coppia del motore, ma aumentano i giri del motore (ed aumentano i consumi).
Non è detto che tutti i motori siano uguali, a parità di avvolgimenti. Ad esempio, parlando di motori da touring con 10.5T, un HobbyWing ha 2800kv, uno SpeedPassion V3 ne ha 3800 ed un Tekin Redline 4500.
Nemico giurato dei motori elettrici è il calore. Il motore deve essere correttamente rapportato (per il corretto rapporto finale bisogna sentire il produttore) e raffreddato correttamente.
I motori elettrici possono essere anticipati ruotando la cassa. Cosa significa? al motore arriva la corrente leggermente prima del previsto ed il campo magnetico riesce ad usufruire per più tempo della massima coppia generata . Tale particolarità consente di aumentare i giri/motore disponibili, anche se (teoricamente) aumenta anche la temperatura.
Si va ad utilizzare sempre l'interazione tra campi magnetici, ma in questo caso i magneti permanenti (o calamite) sono incollate sul rotore, mentre gli avvolgimenti sono sullo statore. Gli avvolgimenti sono collegati al regolatore da 3 fili. In base a dove passa la corrente, la relativa bobina sarà un elettromagnete con polarità positiva o negativa.
In questo caso non ci sono punti di contatto tra rotore e statore, se non i 2 cuscinetti (praticamente l'unica manutenzione di questi motori) dove appoggia il rotore. Visto che le bobine sono sullo statore, come si fa a far ruotare il campo magnetico (visto che sul rotore sono sempre nella stessa posizione)? Semplicemente è il regolatore (o ESC) che tramite i 3 fili genera un campo magnetico rotante. La costruzione del regolatore è un po' più complicata. Questo tipo di motore è più potente, consuma meno corrente rispetto ai brushed ma richiede che il campo magnetico venga generato in maniera precisa e, per far questo, il regolatore deve sapere in che posizione si trova il rotore. Ci sono due tipi di motori brushless, a sensori o senza. Senza sensori, il regolatore "sente" in che posizione si trova il rotore in base alle "interferenze" che le calamite sul rotore generano negli elettromagneti (che essendo collegati al regolatore recepisce queste fluttuazioni). Questo trucchetto funziona purtroppo solamente ad alto numero di giri. Quando il motore gira piano, le interferenze sono talmente deboli che il regolatore non capisce la posizione del rotore, con il risultato che il motore non gira liscio, ma va a scatti (fenomeno chiamato cogging). Per sopperire a questo problema, alcuni brushless hanno un sistema di sensori che, tramite un apposito cavo, comunica al regolatore in che posizione si trova il rotore che, quindi, sa sempre in che posizione sia il rotore. Questo sistema elimina il cogging, ma purtroppo è efficacie solo con un numero di giri non troppo elevato, altrimenti il sistema non riesce a "stare dietro" a tutto.
Alcuni regolatori (come il Tekin RS Pro) sono in grado di usare i sensori a basso numero di giri per avere linearità di accelerazione e, arrivati ad un certo regime, di ignorarli in modo da poter far salire il motori di giri il più possibile.
Per tutti i tipi di motore elettrico ci sono alcuni parametri da tenere in considerazione: i KV ed i T.
I KV indicano quanti giri fa al minuto il motore per ogni volt applicato. 1000kv a 7.4V significa che il motore fa 7400 giri/min dandogli 7.4V
I T indica gli avvolgimenti (turn in inglese). Gli avvolgimenti sono le spire di filo che vanno a formare gli elettromagneti del motore. Maggiore è il numero di avvolgimenti, minore è la velocità di rotazione (e quindi minore è il numero di KV), ma maggiore è la coppia generata dal motore (sui crawler si usano motori da 18.5T, tipo il goat 3s, sino a 80 T). E minori sono i consumi di corrente.
Al contrario, allo scendere con i "T" diminuisce la coppia del motore, ma aumentano i giri del motore (ed aumentano i consumi).
Non è detto che tutti i motori siano uguali, a parità di avvolgimenti. Ad esempio, parlando di motori da touring con 10.5T, un HobbyWing ha 2800kv, uno SpeedPassion V3 ne ha 3800 ed un Tekin Redline 4500.
Nemico giurato dei motori elettrici è il calore. Il motore deve essere correttamente rapportato (per il corretto rapporto finale bisogna sentire il produttore) e raffreddato correttamente.
I motori elettrici possono essere anticipati ruotando la cassa. Cosa significa? al motore arriva la corrente leggermente prima del previsto ed il campo magnetico riesce ad usufruire per più tempo della massima coppia generata . Tale particolarità consente di aumentare i giri/motore disponibili, anche se (teoricamente) aumenta anche la temperatura.
Regolatori
In base al tipo di motore ed all'uso, dovremo scegliere il giusto regolatore (o ESC). Il regolatore svolge 2 funzioni: convertire i nostri comandi per variare la rotazione del motore ed alimentare il resto dell'elettronica (radio e servo in primis).
Per l'alimentazione del resto dell'elettronica, si usa un circuito interno chiamato BEC (Battery Eliminator Circuit) che abbassa la tensione proveniente dalla batteria fino ai circa 5V necessari ad alimentare la radio ed i servi. I BEC sono di due tipi: lineari o switching. Nei regolatori più economici (di solito compatibili con batterie da massimo 11.1V) il BEC è lineare. Prende la corrente in ingresso e la abbassa fino alla tensione necessaria (max 3A di corrente) convertendo i volt in eccesso in temperatura (che va smaltita in qualche modo). Purtroppo questi BEC non sono affidabilissimi.
I BEC switching invece sono indipendenti dalla corrente in ingresso. Prendono "porzioni" di tensione in ingresso per arrivare alla tensione in uscita.
Esistono anche dei BEC esterni che si possono collegare direttamente alla lipo ed alla presa BATT della radio. In questo caso bisogna escludere il bec interno del regolatore. Si può fare facilmente togliendo dalla spinetta che va dal regolatore alla radio il filo "rosso" (o del "+") ed isolarlo. La massa ed il segnale sono invece da lasciare.
 Certi regolatori permettono via software di variare la tensione in uscita dal bec , questa è un’ ottima funzione nel caso si decida di adottare successivamente servi con alimentazioni diverse dai classici 6V . Importante è sempre controllare gli A in uscita dal bec , in certi cralwer 3-4 A non sono sufficienti ad alimentare 2 servi , verricelli , luci ed eccetera , ricorrendo così all’ ausilio di bec esterni con decine di Ampere .
Bisogna scegliere il giusto regolatore in base al motore. Se un motore ha bisogno di 50A di corrente, non possiamo prendere un regolatore che eroga 35A continui, in quanto rischiamo di vederlo fumare in poco tempo. Meglio sempre tenere un po' di margine in modo da essere tranquilli (nell'esempio è meglio puntare su un regolatore da 80A.
Nei motori a spazzole di solito il regolatore è piuttosto semplice. In base a quello che impostiamo col telecomando, otterremo in uscita una diversa tensione. Su questi regolatori normalmente non ci sono tante regolazioni. Possiamo regolare il senso di rotazione (marcia avanti e retro) ed il freno.
Certi regolatori permettono via software di variare la tensione in uscita dal bec , questa è un’ ottima funzione nel caso si decida di adottare successivamente servi con alimentazioni diverse dai classici 6V . Importante è sempre controllare gli A in uscita dal bec , in certi cralwer 3-4 A non sono sufficienti ad alimentare 2 servi , verricelli , luci ed eccetera , ricorrendo così all’ ausilio di bec esterni con decine di Ampere .
Bisogna scegliere il giusto regolatore in base al motore. Se un motore ha bisogno di 50A di corrente, non possiamo prendere un regolatore che eroga 35A continui, in quanto rischiamo di vederlo fumare in poco tempo. Meglio sempre tenere un po' di margine in modo da essere tranquilli (nell'esempio è meglio puntare su un regolatore da 80A.
Nei motori a spazzole di solito il regolatore è piuttosto semplice. In base a quello che impostiamo col telecomando, otterremo in uscita una diversa tensione. Su questi regolatori normalmente non ci sono tante regolazioni. Possiamo regolare il senso di rotazione (marcia avanti e retro) ed il freno.
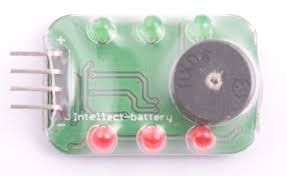
 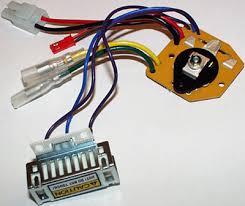 Come dicevo, sono regolatori "semplici" (una volta erano formati da una resistenza variabile mossa da un servo, come da seconda foto). Non sono studiati per essere usati con le LiPo, ma volendo si possono usare anche batterie di ultima generazione. Bisogna solo avere l'accortezza di controllare la carica della batteria man mano che ci si avvicina alla scarica, o dotarsi di un circuito sonoro che ci avvisa quando siamo al limite . Non è un vero e proprio cut-off in quanto non taglia la tensione. Si limita a suonare.
Come dicevo, sono regolatori "semplici" (una volta erano formati da una resistenza variabile mossa da un servo, come da seconda foto). Non sono studiati per essere usati con le LiPo, ma volendo si possono usare anche batterie di ultima generazione. Bisogna solo avere l'accortezza di controllare la carica della batteria man mano che ci si avvicina alla scarica, o dotarsi di un circuito sonoro che ci avvisa quando siamo al limite . Non è un vero e proprio cut-off in quanto non taglia la tensione. Si limita a suonare.
 Nonostante siano regolatori studiati per motori a spazzole, e che tali motori oggi sui modelli on e off (ma anche drift e monster) siano "confinati" a modelli entry level. Ma sono montati in coppia anche su alcuni monster tipo traxxas summit e pilotati o da 2 ESC in coppia o da un solo ESC in grado di pilotare entrambi i motori contemporaneamente (intanto devono muoversi sempre all'unisono).
Nonostante siano regolatori studiati per motori a spazzole, e che tali motori oggi sui modelli on e off (ma anche drift e monster) siano "confinati" a modelli entry level. Ma sono montati in coppia anche su alcuni monster tipo traxxas summit e pilotati o da 2 ESC in coppia o da un solo ESC in grado di pilotare entrambi i motori contemporaneamente (intanto devono muoversi sempre all'unisono).
 Per la particolatià di funzionamento i motori a spazzole sono idonei su modelli come scaler e crawler. Su questi modelli si può usare o un solo motore (classico) dove il bloccaggio degli assi avviene per via meccanica (tramite i dig) o un motore per asse (i MOA - Motor On Axle) ed im questo caso il blocco è tramite ESC
I regolatori per i motori brushless sono un po' più complicati.
Per la particolatià di funzionamento i motori a spazzole sono idonei su modelli come scaler e crawler. Su questi modelli si può usare o un solo motore (classico) dove il bloccaggio degli assi avviene per via meccanica (tramite i dig) o un motore per asse (i MOA - Motor On Axle) ed im questo caso il blocco è tramite ESC
I regolatori per i motori brushless sono un po' più complicati.
 Sono completamente elettronici e programmabili tramite computer (ed apposita interfaccia) o scheda di programmazione.
Sono completamente elettronici e programmabili tramite computer (ed apposita interfaccia) o scheda di programmazione.
__________________
Chi scrive sul forum non viene pagato, non è obbligato e non è presente 24h/24. Se nessuno vi risponde forse nessuno sa la risposta o avete sbagliato sezione. Seguite il regolamento ed usate il tasto cerca...
Ultima modifica di cava; 13-04-12 a 07:16 AM
|